SOFTWARE & TOOLS
Software & Development Tools
Build EtherCAT applications faster with integrated development, configuration, HMI, and engineering tools for QEC systems.
Development
86Duino IDE
Open C/C++ development for industrial control applications, field-level integration, and QEC automation projects.
DownloadEtherCAT
EtherCAT Library
EtherCAT programming tools for real-time application logic, device control, and machine automation development.
Read MoreConfiguration
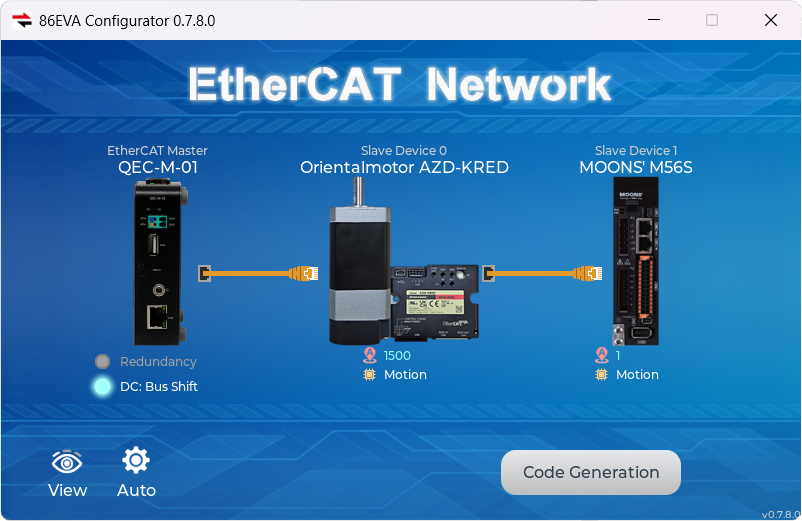
86EVA
Configuration workflow for EtherCAT setup, Virtual Arduino mapping, and project deployment.
Read MoreHMI & Low Code
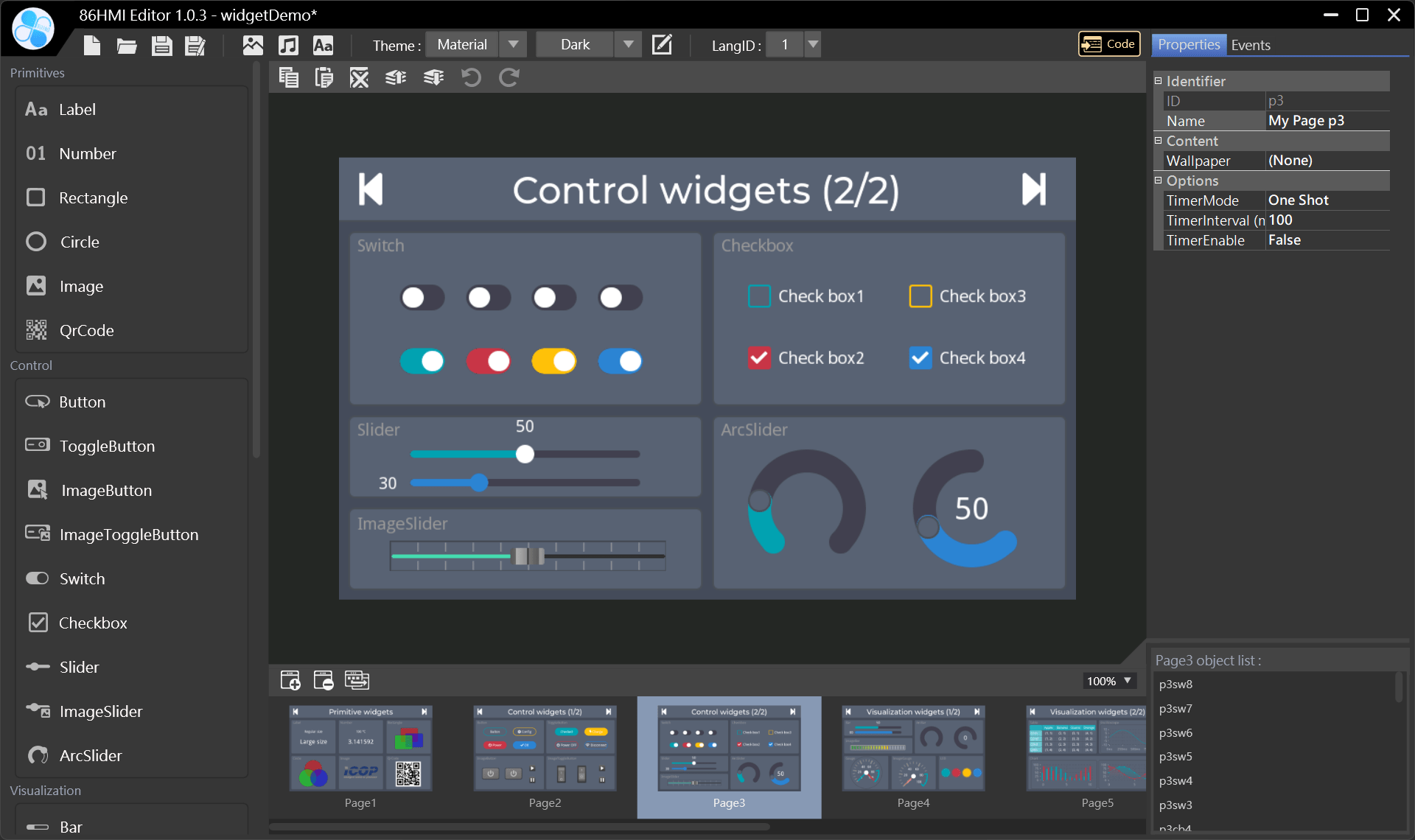
86HMI + ArduBlock
HMI design and low-code project setup for machine interfaces and faster application development.
Read More